NAME
systemctl - Control the systemd system and service manager
SYNOPSIS
|
systemctl [OPTIONS...] COMMAND [UNIT...] |
DESCRIPTION
systemctl may be used to introspect and control the state of the "systemd" system and service manager. Please refer to systemd(1) for an introduction into the basic concepts and functionality this tool manages.
COMMANDS
The following commands are understood:
Unit
Commands (Introspection and Modification)
list-units [PATTERN...]
List units that systemd currently has in memory. This includes units that are either referenced directly or through a dependency, units that are pinned by applications programmatically, or units that were active in the past and have failed. By default only units which are active, have pending jobs, or have failed are shown; this can be changed with option --all. If one or more PATTERNs are specified, only units matching one of them are shown. The units that are shown are additionally filtered by --type= and --state= if those options are specified.
Note that this command does not show unit templates, but only instances of unit templates. Units templates that aren't instantiated are not runnable, and will thus never show up in the output of this command. Specifically this means that foo@.service will never be shown in this list — unless instantiated, e.g. as foo [AT] bar.service. Use list-unit-files (see below) for listing installed unit template files.
Produces output similar to
UNIT LOAD
ACTIVE SUB DESCRIPTION
sys-module-fuse.device loaded active plugged
/sys/module/fuse
-.mount loaded active mounted Root Mount
boot-efi.mount loaded active mounted /boot/efi
systemd-journald.service loaded active running Journal
Service
systemd-logind.service loaded active running Login Service
● user [AT] 1000.service loaded failed failed User Manager
for UID 1000
...
systemd-tmpfiles-clean.timer loaded active waiting Daily
Cleanup of Temporary Directories
LOAD = Reflects
whether the unit definition was properly loaded.
ACTIVE = The high-level unit activation state, i.e.
generalization of SUB.
SUB = The low-level unit activation state, values depend on
unit type.
123 loaded
units listed. Pass --all to see loaded but inactive units,
too.
To show all installed unit files use 'systemctl
list-unit-files'.
The header and the last unit of a given type are underlined if the terminal supports that. A colored dot is shown next to services which were masked, not found, or otherwise failed.
The LOAD column shows the load state, one of loaded, not-found, bad-setting, error, masked. The ACTIVE columns shows the general unit state, one of active, reloading, inactive, failed, activating, deactivating. The SUB column shows the unit-type-specific detailed state of the unit, possible values vary by unit type. The list of possible LOAD, ACTIVE, and SUB states is not constant and new systemd releases may both add and remove values.
systemctl --state=help
command may be used to display the current set of possible values.
This is the default command.
list-automounts [PATTERN...]
List automount units currently in memory, ordered by mount path. If one or more PATTERNs are specified, only automount units matching one of them are shown. Produces output similar to
WHAT WHERE
MOUNTED IDLE TIMEOUT UNIT
/dev/sdb1 /mnt/test no 120s mnt-test.automount
binfmt_misc /proc/sys/fs/binfmt_misc yes 0
proc-sys-fs-binfmt_misc.automount
2 automounts listed.
Also see --show-types, --all, and --state=.
Added in version 252.
list-paths [PATTERN...]
List path units currently in memory, ordered by path. If one or more PATTERNs are specified, only path units matching one of them are shown. Produces output similar to
PATH CONDITION
UNIT ACTIVATES
/run/systemd/ask-password DirectoryNotEmpty
systemd-ask-password-plymouth.path
systemd-ask-password-plymouth.service
/run/systemd/ask-password DirectoryNotEmpty
systemd-ask-password-wall.path
systemd-ask-password-wall.service
/var/cache/cups/org.cups.cupsd PathExists cups.path
cups.service
3 paths listed.
Also see --show-types, --all, and --state=.
Added in version 254.
list-sockets [PATTERN...]
List socket units currently in memory, ordered by listening address. If one or more PATTERNs are specified, only socket units matching one of them are shown. Produces output similar to
LISTEN UNIT
ACTIVATES
/dev/initctl systemd-initctl.socket systemd-initctl.service
...
[::]:22 sshd.socket sshd.service
kobject-uevent 1 systemd-udevd-kernel.socket
systemd-udevd.service
5 sockets listed.
Note: because the addresses might contains spaces, this output is not suitable for programmatic consumption.
Also see --show-types, --all, and --state=.
Added in version 202.
list-timers [PATTERN...]
List timer units currently in memory, ordered by the time they elapse next. If one or more PATTERNs are specified, only units matching one of them are shown. Produces output similar to
NEXT LEFT LAST
PASSED UNIT ACTIVATES
- - Thu 2017-02-23 13:40:29 EST 3 days ago
ureadahead-stop.timer ureadahead-stop.service
Sun 2017-02-26 18:55:42 EST 1min 14s left Thu 2017-02-23
13:54:44 EST 3 days ago systemd-tmpfiles-clean.timer
systemd-tmpfiles-clean.service
Sun 2017-02-26 20:37:16 EST 1h 42min left Sun 2017-02-26
11:56:36 EST 6h ago apt-daily.timer apt-daily.service
Sun 2017-02-26 20:57:49 EST 2h 3min left Sun 2017-02-26
11:56:36 EST 6h ago snapd.refresh.timer
snapd.refresh.service
NEXT shows the next time the timer will run.
LEFT shows how long till the next time the timer runs.
LAST shows the last time the timer ran.
PASSED shows how long has passed since the timer last ran.
UNIT shows the name of the timer
ACTIVATES shows the name the service the timer activates when it runs.
Also see --all and --state=.
Added in version 209.
is-active PATTERN...
Check whether any of the specified units are active (i.e. running). Returns an exit code 0 if at least one is active, or non-zero otherwise. Unless --quiet is specified, this will also print the current unit state to standard output.
is-failed [PATTERN...]
Check whether any of the specified units is in the "failed" state. If no unit is specified, check whether there are any failed units, which corresponds to the "degraded" state returned by is-system-running. Returns an exit code 0 if at least one has failed, non-zero otherwise. Unless --quiet is specified, this will also print the current unit or system state to standard output.
Added in version 197.
status [PATTERN...|PID...]]
Show runtime status information about the whole system or about one or more units followed by most recent log data from the journal. If no positional arguments are specified, and no unit filter is given with --type=, --state=, or --failed, shows the status of the whole system. If combined with --all, follows that with the status of all units. If positional arguments are specified, each positional argument is treated as either a unit name to show, or a glob pattern to show units whose names match that pattern, or a PID to show the unit containing that PID. When --type=, --state=, or --failed are used, units are additionally filtered by the TYPE and ACTIVE state.
This function is intended to generate human-readable output. If you are looking for computer-parsable output, use show instead. By default, this function only shows 10 lines of output and ellipsizes lines to fit in the terminal window. This can be changed with --lines and --full, see above. In addition, journalctl --unit=NAME or journalctl --user-unit=NAME use a similar filter for messages and might be more convenient.
Note that this operation only displays runtime status, i.e. information about the current invocation of the unit (if it is running) or the most recent invocation (if it is not running anymore, and has not been released from memory). Information about earlier invocations, invocations from previous system boots, or prior invocations that have already been released from memory may be retrieved via journalctl --unit=.
systemd implicitly loads units as necessary, so just running the status will attempt to load a file. The command is thus not useful for determining if something was already loaded or not. The units may possibly also be quickly unloaded after the operation is completed if there's no reason to keep it in memory thereafter.
Example 1. Example output from systemctl status
$ systemctl
status bluetooth
● bluetooth.service - Bluetooth service
Loaded: loaded (/usr/lib/systemd/system/bluetooth.service;
enabled; preset: enabled)
Active: active (running) since Wed 2017-01-04 13:54:04 EST;
1 weeks 0 days ago
Docs: man:bluetoothd(8)
Main PID: 930 (bluetoothd)
Status: "Running"
Tasks: 1
Memory: 648.0K
CPU: 435ms
CGroup: /system.slice/bluetooth.service
└─930 /usr/lib/bluetooth/bluetoothd
Jan 12 10:46:45
example.com bluetoothd[8900]: Not enough free handles to
register service
Jan 12 10:46:45 example.com bluetoothd[8900]: Current Time
Service could not be registered
Jan 12 10:46:45 example.com bluetoothd[8900]:
gatt-time-server: Input/output error (5)
The dot ("●") uses color on supported terminals to summarize the unit state at a glance. Along with its color, its shape varies according to its state: "inactive" or "maintenance" is a white circle ("○"), "active" is a green dot ("●"), "deactivating" is a white dot, "failed" or "error" is a red cross ("×"), and "reloading" is a green clockwise circle arrow ("↻").
The "Loaded:" line in the output will show "loaded" if the unit has been loaded into memory. Other possible values for "Loaded:" include: "error" if there was a problem loading it, "not-found" if no unit file was found for this unit, "bad-setting" if an essential unit file setting could not be parsed and "masked" if the unit file has been masked. Along with showing the path to the unit file, this line will also show the enablement state. Enabled units are included in the dependency network between units, and thus are started at boot or via some other form of activation. See the full table of possible enablement states — including the definition of "masked" — in the documentation for the is-enabled command.
The "Active:" line shows active state. The value is usually "active" or "inactive". Active could mean started, bound, plugged in, etc depending on the unit type. The unit could also be in process of changing states, reporting a state of "activating" or "deactivating". A special "failed" state is entered when the service failed in some way, such as a crash, exiting with an error code or timing out. If the failed state is entered the cause will be logged for later reference.
show [PATTERN...|JOB...]
Show properties of one or more units, jobs, or the manager itself. If no argument is specified, properties of the manager will be shown. If a unit name is specified, properties of the unit are shown, and if a job ID is specified, properties of the job are shown. By default, empty properties are suppressed. Use --all to show those too. To select specific properties to show, use --property=. This command is intended to be used whenever computer-parsable output is required. Use status if you are looking for formatted human-readable output.
Many properties shown by systemctl show map directly to configuration settings of the system and service manager and its unit files. Note that the properties shown by the command are generally more low-level, normalized versions of the original configuration settings and expose runtime state in addition to configuration. For example, properties shown for service units include the service's current main process identifier as "MainPID" (which is runtime state), and time settings are always exposed as properties ending in the "...USec" suffix even if a matching configuration options end in "...Sec", because microseconds is the normalized time unit used internally by the system and service manager.
For details about many of these properties, see the documentation of the D-Bus interface backing these properties, see org.freedesktop.systemd1(5).
cat PATTERN...
Show backing files of one or more units. Prints the "fragment" and "drop-ins" (source files) of units. Each file is preceded by a comment which includes the file name. Note that this shows the contents of the backing files on disk, which might not match the system manager's understanding of these units if any unit files were updated on disk and the daemon-reload command wasn't issued since.
Added in version 209.
help PATTERN...|PID...
Show manual pages for one or more units, if available. If a PID is given, the manual pages for the unit the process belongs to are shown.
Added in version 185.
list-dependencies [UNIT...]
Shows units required and wanted by the specified units. This recursively lists units following the Requires=, Requisite=, Wants=, ConsistsOf=, BindsTo=, and Upholds= dependencies. If no units are specified, default.target is implied.
The units that are shown are additionally filtered by --type= and --state= if those options are specified. Note that we won't be able to use a tree structure in this case, so --plain is implied.
By default, only target units are recursively expanded. When --all is passed, all other units are recursively expanded as well.
Options --reverse, --after, --before may be used to change what types of dependencies are shown.
Note that this command only lists units currently loaded into memory by the service manager. In particular, this command is not suitable to get a comprehensive list at all reverse dependencies on a specific unit, as it won't list the dependencies declared by units currently not loaded.
Added in version 198.
start PATTERN...
Start (activate) one or more units specified on the command line.
Note that unit glob patterns expand to names of units currently in memory. Units which are not active and are not in a failed state usually are not in memory, and will not be matched by any pattern. In addition, in case of instantiated units, systemd is often unaware of the instance name until the instance has been started. Therefore, using glob patterns with start has limited usefulness. Also, secondary alias names of units are not considered.
Option --all may be used to also operate on inactive units which are referenced by other loaded units. Note that this is not the same as operating on "all" possible units, because as the previous paragraph describes, such a list is ill-defined. Nevertheless, systemctl start --all GLOB may be useful if all the units that should match the pattern are pulled in by some target which is known to be loaded.
stop PATTERN...
Stop (deactivate) one or more units specified on the command line.
This command will fail if the unit does not exist or if stopping of the unit is prohibited (see RefuseManualStop= in systemd.unit(5)). It will not fail if any of the commands configured to stop the unit (ExecStop=, etc.) fail, because the manager will still forcibly terminate the unit.
If a unit that gets stopped can still be triggered by other units, a warning containing the names of the triggering units is shown. --no-warn can be used to suppress the warning.
reload PATTERN...
Asks all units listed on the command line to reload their configuration. Note that this will reload the service-specific configuration, not the unit configuration file of systemd. If you want systemd to reload the configuration file of a unit, use the daemon-reload command. In other words: for the example case of Apache, this will reload Apache's httpd.conf in the web server, not the apache.service systemd unit file.
This command should not be confused with the daemon-reload command.
restart PATTERN...
Stop and then start one or more units specified on the command line. If the units are not running yet, they will be started.
Note that restarting a unit with this command does not necessarily flush out all of the unit's resources before it is started again. For example, the per-service file descriptor storage facility (see FileDescriptorStoreMax= in systemd.service(5)) will remain intact as long as the unit has a job pending, and is only cleared when the unit is fully stopped and no jobs are pending anymore. If it is intended that the file descriptor store is flushed out, too, during a restart operation an explicit systemctl stop command followed by systemctl start should be issued.
try-restart PATTERN...
Stop and then start one or more units specified on the command line if the units are running. This does nothing if units are not running.
reload-or-restart PATTERN...
Reload one or more units if they support it. If not, stop and then start them instead. If the units are not running yet, they will be started.
try-reload-or-restart PATTERN...
Reload one or more units if they support it. If not, stop and then start them instead. This does nothing if the units are not running.
Added in version 229.
isolate UNIT
Start the unit specified on the command line and its dependencies and stop all others, unless they have IgnoreOnIsolate=yes (see systemd.unit(5)). If a unit name with no extension is given, an extension of ".target" will be assumed.
This command is dangerous, since it will immediately stop processes that are not enabled in the new target, possibly including the graphical environment or terminal you are currently using.
Note that this operation is allowed only on units where AllowIsolate= is enabled. See systemd.unit(5) for details.
kill PATTERN...
Send a UNIX process signal to one or more processes of the unit. Use --kill-whom= to select which process to send the signal to. Use --signal= to select the signal to send. Combine with --kill-value= to enqueue a POSIX Realtime Signal with an associated value.
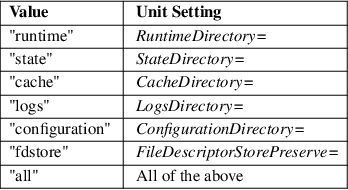
clean PATTERN...
Remove the configuration, state, cache, logs or runtime data of the specified units. Use --what= to select which kind of resource to remove. For service units this may be used to remove the directories configured with ConfigurationDirectory=, StateDirectory=, CacheDirectory=, LogsDirectory= and RuntimeDirectory=, see systemd.exec(5) for details. It may also be used to clear the file descriptor store as enabled via FileDescriptorStoreMax=, see systemd.service(5) for details. For timer units this may be used to clear out the persistent timestamp data if Persistent= is used and --what=state is selected, see systemd.timer(5). This command only applies to units that use either of these settings. If --what= is not specified, the cache and runtime data as well as the file descriptor store are removed (as these three types of resources are generally redundant and reproducible on the next invocation of the unit). Note that the specified units must be stopped to invoke this operation.
Table 1. Possible values for --what=
Added in version 243.
freeze PATTERN...
Freeze one or more units specified on the command line using cgroup freezer
Freezing the unit will cause all processes contained within the cgroup corresponding to the unit to be suspended. Being suspended means that unit's processes won't be scheduled to run on CPU until thawed. Note that this command is supported only on systems that use unified cgroup hierarchy. Unit is automatically thawed just before we execute a job against the unit, e.g. before the unit is stopped.
Added in version 246.
thaw PATTERN...
Thaw (unfreeze) one or more units specified on the command line.
This is the inverse operation to the freeze command and resumes the execution of processes in the unit's cgroup.
Added in version 246.
set-property UNIT PROPERTY=VALUE...
Set the specified unit properties at runtime where this is supported. This allows changing configuration parameter properties such as resource control settings at runtime. Not all properties may be changed at runtime, but many resource control settings (primarily those in systemd.resource-control(5)) may. The changes are applied immediately, and stored on disk for future boots, unless --runtime is passed, in which case the settings only apply until the next reboot. The syntax of the property assignment follows closely the syntax of assignments in unit files.
Example: systemctl set-property foobar.service CPUWeight=200
If the specified unit appears to be inactive, the changes will be only stored on disk as described previously hence they will be effective when the unit will be started.
Note that this command allows changing multiple properties at the same time, which is preferable over setting them individually.
Example: systemctl set-property foobar.service CPUWeight=200 MemoryMax=2G IPAccounting=yes
Like with unit file configuration settings, assigning an empty setting usually resets a property to its defaults.
Example: systemctl set-property avahi-daemon.service IPAddressDeny=
Added in version 206.
bind UNIT PATH [PATH]
Bind-mounts a file or directory from the host into the specified unit's mount namespace. The first path argument is the source file or directory on the host, the second path argument is the destination file or directory in the unit's mount namespace. When the latter is omitted, the destination path in the unit's mount namespace is the same as the source path on the host. When combined with the --read-only switch, a ready-only bind mount is created. When combined with the --mkdir switch, the destination path is first created before the mount is applied.
Note that this option is currently only supported for units that run within a mount namespace (e.g.: with RootImage=, PrivateMounts=, etc.). This command supports bind-mounting directories, regular files, device nodes, AF_UNIX socket nodes, as well as FIFOs. The bind mount is ephemeral, and it is undone as soon as the current unit process exists. Note that the namespace mentioned here, where the bind mount will be added to, is the one where the main service process runs. Other processes (those exececuted by ExecReload=, ExecStartPre=, etc.) run in distinct namespaces.
If supported by the kernel, any prior mount on the selected target will be replaced by the new mount. If not supported, any prior mount will be over-mounted, but remain pinned and inaccessible.
Added in version 248.
mount-image UNIT IMAGE [PATH [PARTITION_NAME:MOUNT_OPTIONS]]
Mounts an image from the host into the specified unit's mount namespace. The first path argument is the source image on the host, the second path argument is the destination directory in the unit's mount namespace (i.e. inside RootImage=/RootDirectory=). The following argument, if any, is interpreted as a colon-separated tuple of partition name and comma-separated list of mount options for that partition. The format is the same as the service MountImages= setting. When combined with the --read-only switch, a ready-only mount is created. When combined with the --mkdir switch, the destination path is first created before the mount is applied.
Note that this option is currently only supported for units that run within a mount namespace (i.e. with RootImage=, PrivateMounts=, etc.). Note that the namespace mentioned here where the image mount will be added to, is the one where the main service process runs. Note that the namespace mentioned here, where the bind mount will be added to, is the one where the main service process runs. Other processes (those exececuted by ExecReload=, ExecStartPre=, etc.) run in distinct namespaces.
If supported by the kernel, any prior mount on the selected target will be replaced by the new mount. If not supported, any prior mount will be over-mounted, but remain pinned and inaccessible.
Example:
systemctl mount-image foo.service /tmp/img.raw /var/lib/image root:ro,nosuid
systemctl mount-image --mkdir bar.service /tmp/img.raw /var/lib/baz/img
Added in version 248.
service-log-level SERVICE [LEVEL]
If the LEVEL argument is not given, print the current log level as reported by service SERVICE.
If the optional argument LEVEL is provided, then change the current log level of the service to LEVEL. The log level should be a typical syslog log level, i.e. a value in the range 0...7 or one of the strings emerg, alert, crit, err, warning, notice, info, debug; see syslog(3) for details.
The service must have the appropriate BusName=destination property and also implement the generic org.freedesktop.LogControl1(5) interface. (systemctl will use the generic D-Bus protocol to access the org.freedesktop.LogControl1.LogLevel interface for the D-Bus name destination.)
Added in version 247.
service-log-target SERVICE [TARGET]
If the TARGET argument is not given, print the current log target as reported by service SERVICE.
If the optional argument TARGET is provided, then change the current log target of the service to TARGET. The log target should be one of the strings console (for log output to the service's standard error stream), kmsg (for log output to the kernel log buffer), journal (for log output to systemd-journald.service(8) using the native journal protocol), syslog (for log output to the classic syslog socket /dev/log), null (for no log output whatsoever) or auto (for an automatically determined choice, typically equivalent to console if the service is invoked interactively, and journal or syslog otherwise).
For most services, only a small subset of log targets make sense. In particular, most "normal" services should only implement console, journal, and null. Anything else is only appropriate for low-level services that are active in very early boot before proper logging is established.
The service must have the appropriate BusName=destination property and also implement the generic org.freedesktop.LogControl1(5) interface. (systemctl will use the generic D-Bus protocol to access the org.freedesktop.LogControl1.LogLevel interface for the D-Bus name destination.)
Added in version 247.
reset-failed [PATTERN...]
Reset the "failed" state of the specified units, or if no unit name is passed, reset the state of all units. When a unit fails in some way (i.e. process exiting with non-zero error code, terminating abnormally or timing out), it will automatically enter the "failed" state and its exit code and status is recorded for introspection by the administrator until the service is stopped/re-started or reset with this command.
In addition to resetting the "failed" state of a unit it also resets various other per-unit properties: the start rate limit counter of all unit types is reset to zero, as is the restart counter of service units. Thus, if a unit's start limit (as configured with StartLimitIntervalSec=/StartLimitBurst=) is hit and the unit refuses to be started again, use this command to make it startable again.
whoami [PID...]
Returns the units the processes referenced by the given PIDs belong to (one per line). If no PID is specified returns the unit the systemctl command is invoked in.
Added in version 254.
Unit File
Commands
list-unit-files [PATTERN...]
List unit files installed on the system, in combination with their enablement state (as reported by is-enabled). If one or more PATTERNs are specified, only unit files whose name matches one of them are shown (patterns matching unit file system paths are not supported).
Unlike list-units this command will list template units in addition to explicitly instantiated units.
Added in version 233.
enable UNIT..., enable PATH...
Enable one or more units or unit instances. This will create a set of symlinks, as encoded in the [Install] sections of the indicated unit files. After the symlinks have been created, the system manager configuration is reloaded (in a way equivalent to daemon-reload), in order to ensure the changes are taken into account immediately. Note that this does not have the effect of also starting any of the units being enabled. If this is desired, combine this command with the --now switch, or invoke start with appropriate arguments later. Note that in case of unit instance enablement (i.e. enablement of units of the form foo [AT] bar.service), symlinks named the same as instances are created in the unit configuration directory, however they point to the single template unit file they are instantiated from.
This command expects either valid unit names (in which case various unit file directories are automatically searched for unit files with appropriate names), or absolute paths to unit files (in which case these files are read directly). If a specified unit file is located outside of the usual unit file directories, an additional symlink is created, linking it into the unit configuration path, thus ensuring it is found when requested by commands such as start. The file system where the linked unit files are located must be accessible when systemd is started (e.g. anything underneath /home/ or /var/ is not allowed, unless those directories are located on the root file system).
This command will print the file system operations executed. This output may be suppressed by passing --quiet.
Note that this operation creates only the symlinks suggested in the [Install] section of the unit files. While this command is the recommended way to manipulate the unit configuration directory, the administrator is free to make additional changes manually by placing or removing symlinks below this directory. This is particularly useful to create configurations that deviate from the suggested default installation. In this case, the administrator must make sure to invoke daemon-reload manually as necessary, in order to ensure the changes are taken into account.
When using this operation on units without install information, a warning about it is shown. --no-warn can be used to suppress the warning.
Enabling units should not be confused with starting (activating) units, as done by the start command. Enabling and starting units is orthogonal: units may be enabled without being started and started without being enabled. Enabling simply hooks the unit into various suggested places (for example, so that the unit is automatically started on boot or when a particular kind of hardware is plugged in). Starting actually spawns the daemon process (in case of service units), or binds the socket (in case of socket units), and so on.
Depending on whether --system, --user, --runtime, or --global is specified, this enables the unit for the system, for the calling user only, for only this boot of the system, or for all future logins of all users. Note that in the last case, no systemd daemon configuration is reloaded.
Using enable on masked units is not supported and results in an error.
disable UNIT...
Disables one or more units. This removes all symlinks to the unit files backing the specified units from the unit configuration directory, and hence undoes any changes made by enable or link. Note that this removes all symlinks to matching unit files, including manually created symlinks, and not just those actually created by enable or link. Note that while disable undoes the effect of enable, the two commands are otherwise not symmetric, as disable may remove more symlinks than a prior enable invocation of the same unit created.
This command expects valid unit names only, it does not accept paths to unit files.
In addition to the units specified as arguments, all units are disabled that are listed in the Also= setting contained in the [Install] section of any of the unit files being operated on.
This command implicitly reloads the system manager configuration after completing the operation. Note that this command does not implicitly stop the units that are being disabled. If this is desired, either combine this command with the --now switch, or invoke the stop command with appropriate arguments later.
This command will print information about the file system operations (symlink removals) executed. This output may be suppressed by passing --quiet.
If a unit gets disabled but its triggering units are still active, a warning containing the names of the triggering units is shown. --no-warn can be used to suppress the warning.
When this command is used with --user, the units being operated on might still be enabled in global scope, and thus get started automatically even after a successful disablement in user scope. In this case, a warning about it is shown, which can be suppressed using --no-warn.
This command honors --system, --user, --runtime, --global and --no-warn in a similar way as enable.
Added in version 238.
reenable UNIT...
Reenable one or more units, as specified on the command line. This is a combination of disable and enable and is useful to reset the symlinks a unit file is enabled with to the defaults configured in its [Install] section. This command expects a unit name only, it does not accept paths to unit files.
Added in version 238.
preset UNIT...
Reset the enable/disable status one or more unit files, as specified on the command line, to the defaults configured in the preset policy files. This has the same effect as disable or enable, depending how the unit is listed in the preset files.
Use --preset-mode= to control whether units shall be enabled and disabled, or only enabled, or only disabled.
If the unit carries no install information, it will be silently ignored by this command. UNIT must be the real unit name, any alias names are ignored silently.
For more information on the preset policy format, see systemd.preset(5).
Added in version 238.
preset-all
Resets all installed unit files to the defaults configured in the preset policy file (see above).
Use --preset-mode= to control whether units shall be enabled and disabled, or only enabled, or only disabled.
Added in version 215.
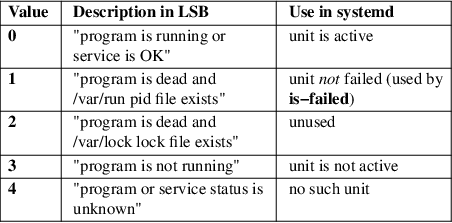
is-enabled UNIT...
Checks whether any of the specified unit files are enabled (as with enable). Returns an exit code of 0 if at least one is enabled, non-zero otherwise. Prints the current enable status (see table). To suppress this output, use --quiet. To show installation targets, use --full.
Table 2. is-enabled output
Added in version 238.
mask UNIT...
Mask one or more units, as specified on the command line. This will link these unit files to /dev/null, making it impossible to start them. This is a stronger version of disable, since it prohibits all kinds of activation of the unit, including enablement and manual activation. Use this option with care. This honors the --runtime option to only mask temporarily until the next reboot of the system. The --now option may be used to ensure that the units are also stopped. This command expects valid unit names only, it does not accept unit file paths.
Note that this will create a symlink under the unit's name in /etc/systemd/system/ (in case --runtime is not specified) or /run/systemd/system/ (in case --runtime is specified). If a matching unit file already exists under these directories this operation will hence fail. This means that the operation is primarily useful to mask units shipped by the vendor (as those are shipped in /usr/lib/systemd/system/ and not the aforementioned two directories), but typically doesn't work for units created locally (as those are typically placed precisely in the two aforementioned directories). Similar restrictions apply for --user mode, in which case the directories are below the user's home directory however.
If a unit gets masked but its triggering units are still active, a warning containing the names of the triggering units is shown. --no-warn can be used to suppress the warning.
Added in version 238.
unmask UNIT...
Unmask one or more unit files, as specified on the command line. This will undo the effect of mask. This command expects valid unit names only, it does not accept unit file paths.
Added in version 238.
link PATH...
Link a unit file that is not in the unit file search path into the unit file search path. This command expects an absolute path to a unit file. The effect of this may be undone with disable. The effect of this command is that a unit file is made available for commands such as start, even though it is not installed directly in the unit search path. The file system where the linked unit files are located must be accessible when systemd is started (e.g. anything underneath /home/ or /var/ is not allowed, unless those directories are located on the root file system).
Added in version 233.
revert UNIT...
Revert one or more unit files to their vendor versions. This command removes drop-in configuration files that modify the specified units, as well as any user-configured unit file that overrides a matching vendor supplied unit file. Specifically, for a unit "foo.service" the matching directories "foo.service.d/" with all their contained files are removed, both below the persistent and runtime configuration directories (i.e. below /etc/systemd/system and /run/systemd/system); if the unit file has a vendor-supplied version (i.e. a unit file located below /usr/) any matching persistent or runtime unit file that overrides it is removed, too. Note that if a unit file has no vendor-supplied version (i.e. is only defined below /etc/systemd/system or /run/systemd/system, but not in a unit file stored below /usr/), then it is not removed. Also, if a unit is masked, it is unmasked.
Effectively, this command may be used to undo all changes made with systemctl edit, systemctl set-property and systemctl mask and puts the original unit file with its settings back in effect.
Added in version 230.
add-wants TARGET UNIT..., add-requires TARGET UNIT...
Adds "Wants=" or "Requires=" dependencies, respectively, to the specified TARGET for one or more units.
This command honors --system, --user, --runtime and --global in a way similar to enable.
Added in version 217.
edit UNIT...
Edit or replace a drop-in snippet or the main unit file, to extend or override the definition of the specified unit.
Depending on whether --system (the default), --user, or --global is specified, this command will operate on the system unit files, unit files for the calling user, or the unit files shared between all users.
The editor (see the "Environment" section below) is invoked on temporary files which will be written to the real location if the editor exits successfully. After the editing is finished, configuration is reloaded, equivalent to systemctl daemon-reload --system or systemctl daemon-reload --user. For edit --global, the reload is not performed and the edits will take effect only for subsequent logins (or after a reload is requested in a different way).
If --full is specified, a replacement for the main unit file will be created or edited. Otherwise, a drop-in file will be created or edited.
If --drop-in= is specified, the given drop-in file name will be used instead of the default override.conf.
The unit must exist, i.e. its main unit file must be present. If --force is specified, this requirement is ignored and a new unit may be created (with --full), or a drop-in for a nonexistent unit may be created.
If --runtime is specified, the changes will be made temporarily in /run/ and they will be lost on the next reboot.
If --stdin is specified, the new contents will be read from standard input. In this mode, the old contents of the file are discarded.
If the temporary file is empty upon exit, the modification of the related unit is canceled.
Note that this command cannot be used to remotely edit units and that you cannot temporarily edit units which are in /etc/, since they take precedence over /run/.
Added in version 218.
get-default
Return the default target to boot into. This returns the target unit name default.target is aliased (symlinked) to.
Added in version 205.
set-default TARGET
Set the default target to boot into. This sets (symlinks) the default.target alias to the given target unit.
Added in version 205.
Machine
Commands
list-machines [PATTERN...]
List the host and all running local containers with their state. If one or more PATTERNs are specified, only containers matching one of them are shown.
Added in version 212.
Job Commands
list-jobs [PATTERN...]
List jobs that are in progress. If one or more PATTERNs are specified, only jobs for units matching one of them are shown.
When combined with --after or --before the list is augmented with information on which other job each job is waiting for, and which other jobs are waiting for it, see above.
Added in version 233.
cancel [JOB...]
Cancel one or more jobs specified on the command line by their numeric job IDs. If no job ID is specified, cancel all pending jobs.
Added in version 233.
Environment
Commands
systemd supports an environment block that is passed to
processes the manager spawns. The names of the variables can
contain ASCII letters, digits, and the underscore character.
Variable names cannot be empty or start with a digit. In
variable values, most characters are allowed, but the whole
sequence must be valid UTF-8. (Note that control characters
like newline (NL), tab (TAB), or the escape
character (ESC), are valid ASCII and thus
valid UTF-8). The total length of the environment block is
limited to _SC_ARG_MAX value defined by
sysconf(3).
show-environment
Dump the systemd manager environment block. This is the environment block that is passed to all processes the manager spawns. The environment block will be dumped in straightforward form suitable for sourcing into most shells. If no special characters or whitespace is present in the variable values, no escaping is performed, and the assignments have the form "VARIABLE=value". If whitespace or characters which have special meaning to the shell are present, dollar-single-quote escaping is used, and assignments have the form "VARIABLE=$'value'". This syntax is known to be supported by bash(1), zsh(1), ksh(1), and busybox(1)'s ash(1), but not dash(1) or fish(1).
Note that this shows the effective block, i.e. the combination of environment variables configured via configuration files, environment generators and via IPC (i.e. via the set-environment described below). At the moment a unit process is forked off this combined environment block will be further combined with per-unit environment variables, which are not visible in this command.
set-environment VARIABLE=VALUE...
Set one or more service manager environment variables, as specified on the command line. This command will fail if variable names and values do not conform to the rules listed above.
Note that this operates on an environment block separate from the environment block configured from service manager configuration and environment generators. Whenever a process is invoked the two blocks are combined (also incorporating any per-service environment variables), and passed to it. The show-environment verb will show the combination of the blocks, see above.
Added in version 233.
unset-environment VARIABLE...
Unset one or more systemd manager environment variables. If only a variable name is specified, it will be removed regardless of its value. If a variable and a value are specified, the variable is only removed if it has the specified value.
Note that this operates on an environment block separate from the environment block configured from service manager configuration and environment generators. Whenever a process is invoked the two blocks are combined (also incorporating any per-service environment variables), and passed to it. The show-environment verb will show the combination of the blocks, see above. Note that this means this command cannot be used to unset environment variables defined in the service manager configuration files or via generators.
Added in version 233.
import-environment VARIABLE...
Import all, one or more environment variables set on the client into the systemd manager environment block. If a list of environment variable names is passed, client-side values are then imported into the manager's environment block. If any names are not valid environment variable names or have invalid values according to the rules described above, an error is raised. If no arguments are passed, the entire environment block inherited by the systemctl process is imported. In this mode, any inherited invalid environment variables are quietly ignored.
Importing of the full inherited environment block (calling this command without any arguments) is deprecated. A shell will set dozens of variables which only make sense locally and are only meant for processes which are descendants of the shell. Such variables in the global environment block are confusing to other processes.
Added in version 209.
Manager
State Commands
daemon-reload
Reload the systemd manager configuration. This will rerun all generators (see systemd.generator(7)), reload all unit files, and recreate the entire dependency tree. While the daemon is being reloaded, all sockets systemd listens on behalf of user configuration will stay accessible.
This command should not be confused with the reload command.
daemon-reexec
Reexecute the systemd manager. This will serialize the manager state, reexecute the process and deserialize the state again. This command is of little use except for debugging and package upgrades. Sometimes, it might be helpful as a heavy-weight daemon-reload. While the daemon is being reexecuted, all sockets systemd listening on behalf of user configuration will stay accessible.
log-level [LEVEL]
If no argument is given, print the current log level of the manager. If an optional argument LEVEL is provided, then the command changes the current log level of the manager to LEVEL (accepts the same values as --log-level= described in systemd(1)).
Added in version 244.
log-target [TARGET]
If no argument is given, print the current log target of the manager. If an optional argument TARGET is provided, then the command changes the current log target of the manager to TARGET (accepts the same values as --log-target=, described in systemd(1)).
Added in version 244.
service-watchdogs [yes|no]
If no argument is given, print the current state of service runtime watchdogs of the manager. If an optional boolean argument is provided, then globally enables or disables the service runtime watchdogs (WatchdogSec=) and emergency actions (e.g. OnFailure= or StartLimitAction=); see systemd.service(5). The hardware watchdog is not affected by this setting.
Added in version 244.
System
Commands
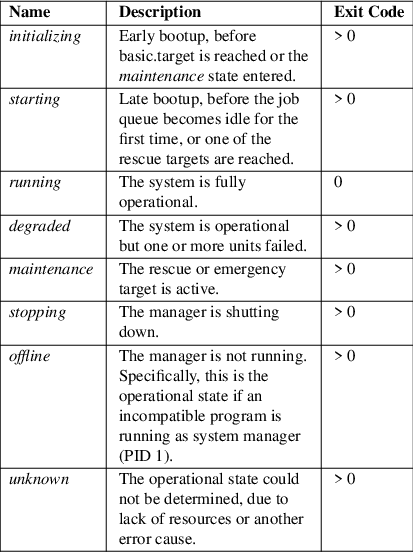
is-system-running
Checks whether the system is operational. This returns success (exit code 0) when the system is fully up and running, specifically not in startup, shutdown or maintenance mode, and with no failed services. Failure is returned otherwise (exit code non-zero). In addition, the current state is printed in a short string to standard output, see the table below. Use --quiet to suppress this output.
Use --wait to wait until the boot process is completed before printing the current state and returning the appropriate error status. If --wait is in use, states initializing or starting will not be reported, instead the command will block until a later state (such as running or degraded) is reached.
Table 3. is-system-running output
Added in version 215.
default
Enter default mode. This is equivalent to systemctl isolate default.target. This operation is blocking by default, use --no-block to request asynchronous behavior.
rescue
Enter rescue mode. This is equivalent to systemctl isolate rescue.target. This operation is blocking by default, use --no-block to request asynchronous behavior.
emergency
Enter emergency mode. This is equivalent to systemctl isolate emergency.target. This operation is blocking by default, use --no-block to request asynchronous behavior.
halt
Shut down and halt the system. This is mostly equivalent to systemctl start halt.target --job-mode=replace-irreversibly --no-block, but also prints a wall message to all users. This command is asynchronous; it will return after the halt operation is enqueued, without waiting for it to complete. Note that this operation will simply halt the OS kernel after shutting down, leaving the hardware powered on. Use systemctl poweroff for powering off the system (see below).
If combined with --force, shutdown of all running services is skipped, however all processes are killed and all file systems are unmounted or mounted read-only, immediately followed by the system halt. If --force is specified twice, the operation is immediately executed without terminating any processes or unmounting any file systems. This may result in data loss. Note that when --force is specified twice the halt operation is executed by systemctl itself, and the system manager is not contacted. This means the command should succeed even when the system manager has crashed.
If combined with --when=, shutdown will be scheduled after the given timestamp. And --when=cancel will cancel the shutdown.
poweroff
Shut down and power-off the system. This is mostly equivalent to systemctl start poweroff.target --job-mode=replace-irreversibly --no-block, but also prints a wall message to all users. This command is asynchronous; it will return after the power-off operation is enqueued, without waiting for it to complete.
This command honors --force and --when= in a similar way as halt.
reboot
Shut down and reboot the system.
This command mostly equivalent to systemctl start reboot.target --job-mode=replace-irreversibly --no-block, but also prints a wall message to all users. This command is asynchronous; it will return after the reboot operation is enqueued, without waiting for it to complete.
If the switch --reboot-argument= is given, it will be passed as the optional argument to the reboot(2) system call.
Options --boot-loader-entry=, --boot-loader-menu=, and --firmware-setup can be used to select what to do after the reboot. See the descriptions of those options for details.
This command honors --force and --when= in a similar way as halt.
If a new kernel has been loaded via kexec --load, a kexec will be performed instead of a reboot, unless "SYSTEMCTL_SKIP_AUTO_KEXEC=1" has been set. If a new root file system has been set up on "/run/nextroot/", a soft-reboot will be performed instead of a reboot, unless "SYSTEMCTL_SKIP_AUTO_SOFT_REBOOT=1" has been set.
Added in version 246.
kexec
Shut down and reboot the system via kexec. This command will load a kexec kernel if one wasn't loaded yet or fail. A kernel may be loaded earlier by a separate step, this is particularly useful if a custom initrd or additional kernel command line options are desired. The --force can be used to continue without a kexec kernel, i.e. to perform a normal reboot. The final reboot step is equivalent to systemctl start kexec.target --job-mode=replace-irreversibly --no-block.
To load a kernel, an enumeration is performed following the Boot Loader Specification [1] , and the default boot entry is loaded. For this step to succeed, the system must be using UEFI and the boot loader entries must be configured appropriately. bootctl list may be used to list boot entries, see bootctl(1).
This command is asynchronous; it will return after the reboot operation is enqueued, without waiting for it to complete.
This command honors --force and --when= similarly to halt.
If a new kernel has been loaded via kexec --load, a kexec will be performed when reboot is invoked, unless "SYSTEMCTL_SKIP_AUTO_KEXEC=1" has been set.
soft-reboot
Shut down and reboot userspace. This is equivalent to systemctl start soft-reboot.target --job-mode=replace-irreversibly --no-block. This command is asynchronous; it will return after the reboot operation is enqueued, without waiting for it to complete.
This command honors --force and --when= in a similar way as halt.
This operation only reboots userspace, leaving the kernel running. See systemd-soft-reboot.service(8) for details.
If a new root file system has been set up on "/run/nextroot/", a soft-reboot will be performed when reboot is invoked, unless "SYSTEMCTL_SKIP_AUTO_SOFT_REBOOT=1" has been set.
Added in version 254.
exit [EXIT_CODE]
Ask the service manager to quit. This is only supported for user service managers (i.e. in conjunction with the --user option) or in containers and is equivalent to poweroff otherwise. This command is asynchronous; it will return after the exit operation is enqueued, without waiting for it to complete.
The service manager will exit with the specified exit code, if EXIT_CODE is passed.
Added in version 227.
switch-root [ROOT [INIT]]
Switches to a different root directory and executes a new system manager process below it. This is intended for use in the initrd, and will transition from the initrd's system manager process (a.k.a. "init" process, PID 1) to the main system manager process which is loaded from the actual host root files system. This call takes two arguments: the directory that is to become the new root directory, and the path to the new system manager binary below it to execute as PID 1. If both are omitted or the former is an empty string it defaults to /sysroot/. If the latter is omitted or is an empty string, a systemd binary will automatically be searched for and used as service manager. If the system manager path is omitted, equal to the empty string or identical to the path to the systemd binary, the state of the initrd's system manager process is passed to the main system manager, which allows later introspection of the state of the services involved in the initrd boot phase.
Added in version 209.
sleep
Put the system to sleep, through suspend, hibernate, hybrid-sleep, or suspend-then-hibernate. The sleep operation to use is automatically selected by systemd-logind.service(8). By default, suspend-then-hibernate is used, and falls back to suspend and then hibernate if not supported. Refer to SleepOperation= setting in logind.conf(5) for more details. This command is asynchronous, and will return after the sleep operation is successfully enqueued. It will not wait for the sleep/resume cycle to complete.
Added in version 256.
suspend
Suspend the system. This will trigger activation of the special target unit suspend.target. This command is asynchronous, and will return after the suspend operation is successfully enqueued. It will not wait for the suspend/resume cycle to complete.
If --force is specified, and systemd-logind returned error for the operation, the error will be ignored and the operation will be tried again directly through starting the target unit.
hibernate
Hibernate the system. This will trigger activation of the special target unit hibernate.target. This command is asynchronous, and will return after the hibernation operation is successfully enqueued. It will not wait for the hibernate/thaw cycle to complete.
This command honors --force in the same way as suspend.
hybrid-sleep
Hibernate and suspend the system. This will trigger activation of the special target unit hybrid-sleep.target. This command is asynchronous, and will return after the hybrid sleep operation is successfully enqueued. It will not wait for the sleep/wake-up cycle to complete.
This command honors --force in the same way as suspend.
Added in version 196.
suspend-then-hibernate
Suspend the system and hibernate it when the battery is low, or when the delay specified in systemd-sleep.conf elapsed. This will trigger activation of the special target unit suspend-then-hibernate.target. This command is asynchronous, and will return after the hybrid sleep operation is successfully enqueued. It will not wait for the sleep/wake-up or hibernate/thaw cycle to complete.
This command honors --force in the same way as suspend.
Added in version 240.
Parameter
Syntax
Unit commands listed above take either a single unit name
(designated as UNIT), or multiple unit specifications
(designated as PATTERN...). In the first case, the
unit name with or without a suffix must be given. If the
suffix is not specified (unit name is
"abbreviated"), systemctl will append a suitable
suffix, ".service" by default, and a type-specific
suffix in case of commands which operate only on specific
unit types. For example,
# systemctl start sshd
and
# systemctl start sshd.service
are equivalent, as are
# systemctl isolate default
and
# systemctl isolate default.target
Note that (absolute) paths to device nodes are automatically converted to device unit names, and other (absolute) paths to mount unit names.
#
systemctl status /dev/sda
# systemctl status /home
are equivalent to:
#
systemctl status dev-sda.device
# systemctl status home.mount
In the second case, shell-style globs will be matched against the primary names of all units currently in memory; literal unit names, with or without a suffix, will be treated as in the first case. This means that literal unit names always refer to exactly one unit, but globs may match zero units and this is not considered an error.
Glob patterns use fnmatch(3), so normal shell-style globbing rules are used, and "*", "?", "[]" may be used. See glob(7) for more details. The patterns are matched against the primary names of units currently in memory, and patterns which do not match anything are silently skipped. For example:
# systemctl stop "sshd@*.service"
will stop all sshd@.service instances. Note that alias names of units, and units that aren't in memory are not considered for glob expansion.
For unit file commands, the specified UNIT should be the name of the unit file (possibly abbreviated, see above), or the absolute path to the unit file:
# systemctl enable foo.service
or
# systemctl link /path/to/foo.service
OPTIONS
The following options are understood:
-t, --type=
The argument is a comma-separated list of unit types such as service and socket. When units are listed with list-units, list-dependencies, show, or status, only units of the specified types will be shown. By default, units of all types are shown.
As a special case, if one of the arguments is help, a list of allowed values will be printed and the program will exit.
--state=
The argument is a comma-separated list of unit LOAD, SUB, or ACTIVE states. When listing units with list-units, list-dependencies, show or status, show only those in the specified states. Use --state=failed or --failed to show only failed units.
As a special case, if one of the arguments is help, a list of allowed values will be printed and the program will exit.
Added in version 206.
-p, --property=
When showing unit/job/manager properties with the show command, limit display to properties specified in the argument. The argument should be a comma-separated list of property names, such as "MainPID". Unless specified, all known properties are shown. If specified more than once, all properties with the specified names are shown. Shell completion is implemented for property names.
For the manager itself, systemctl show will show all available properties, most of which are derived or closely match the options described in systemd-system.conf(5).
Properties for units vary by unit type, so showing any unit (even a non-existent one) is a way to list properties pertaining to this type. Similarly, showing any job will list properties pertaining to all jobs. Properties for units are documented in systemd.unit(5), and the pages for individual unit types systemd.service(5), systemd.socket(5), etc.
-P
Equivalent to --value --property=, i.e. shows the value of the property without the property name or "=". Note that using -P once will also affect all properties listed with -p/--property=.
Added in version 246.
-a, --all
When listing units with list-units, also show inactive units and units which are following other units. When showing unit/job/manager properties, show all properties regardless whether they are set or not.
To list all units installed in the file system, use the list-unit-files command instead.
When listing units with list-dependencies, recursively show dependencies of all dependent units (by default only dependencies of target units are shown).
When used with status, show journal messages in full, even if they include unprintable characters or are very long. By default, fields with unprintable characters are abbreviated as "blob data". (Note that the pager may escape unprintable characters again.)
-r, --recursive
When listing units, also show units of local containers. Units of local containers will be prefixed with the container name, separated by a single colon character (":").
Added in version 212.
--reverse
Show reverse dependencies between units with list-dependencies, i.e. follow dependencies of type WantedBy=, RequiredBy=, UpheldBy=, PartOf=, BoundBy=, instead of Wants= and similar.
Added in version 203.
--after
With list-dependencies, show the units that are ordered before the specified unit. In other words, recursively list units following the After= dependency.
Note that any After= dependency is automatically mirrored to create a Before= dependency. Temporal dependencies may be specified explicitly, but are also created implicitly for units which are WantedBy= targets (see systemd.target(5)), and as a result of other directives (for example RequiresMountsFor=). Both explicitly and implicitly introduced dependencies are shown with list-dependencies.
When passed to the list-jobs command, for each printed job show which other jobs are waiting for it. May be combined with --before to show both the jobs waiting for each job as well as all jobs each job is waiting for.
Added in version 203.
--before
With list-dependencies, show the units that are ordered after the specified unit. In other words, recursively list units following the Before= dependency.
When passed to the list-jobs command, for each printed job show which other jobs it is waiting for. May be combined with --after to show both the jobs waiting for each job as well as all jobs each job is waiting for.
Added in version 212.
--with-dependencies
When used with status, cat, list-units, and list-unit-files, those commands print all specified units and the dependencies of those units.
Options --reverse, --after, --before may be used to change what types of dependencies are shown.
Added in version 245.
-l, --full
Do not ellipsize unit names, process tree entries, journal output, or truncate unit descriptions in the output of status, list-units, list-jobs, and list-timers.
Also, show installation targets in the output of is-enabled.
--value
When printing properties with show, only print the value, and skip the property name and "=". Also see option -P above.
Added in version 230.
--show-types
When showing sockets, show the type of the socket.
Added in version 202.
--job-mode=
When queuing a new job, this option controls how to deal with already queued jobs. It takes one of "fail", "replace", "replace-irreversibly", "isolate", "ignore-dependencies", "ignore-requirements", "flush", "triggering", or "restart-dependencies". Defaults to "replace", except when the isolate command is used which implies the "isolate" job mode.
If "fail" is specified and a requested operation conflicts with a pending job (more specifically: causes an already pending start job to be reversed into a stop job or vice versa), cause the operation to fail.
If "replace" (the default) is specified, any conflicting pending job will be replaced, as necessary.
If "replace-irreversibly" is specified, operate like "replace", but also mark the new jobs as irreversible. This prevents future conflicting transactions from replacing these jobs (or even being enqueued while the irreversible jobs are still pending). Irreversible jobs can still be cancelled using the cancel command. This job mode should be used on any transaction which pulls in shutdown.target.
"isolate" is only valid for start operations and causes all other units to be stopped when the specified unit is started. This mode is always used when the isolate command is used.
"flush" will cause all queued jobs to be canceled when the new job is enqueued.
If "ignore-dependencies" is specified, then all unit dependencies are ignored for this new job and the operation is executed immediately. If passed, no required units of the unit passed will be pulled in, and no ordering dependencies will be honored. This is mostly a debugging and rescue tool for the administrator and should not be used by applications.
"ignore-requirements" is similar to "ignore-dependencies", but only causes the requirement dependencies to be ignored, the ordering dependencies will still be honored.
"triggering" may only be used with systemctl stop. In this mode, the specified unit and any active units that trigger it are stopped. See the discussion of Triggers= in systemd.unit(5) for more information about triggering units.
"restart-dependencies" may only be used with systemctl start. In this mode, dependencies of the specified unit will receive restart propagation, as if a restart job had been enqueued for the unit.
Added in version 209.
-T, --show-transaction
When enqueuing a unit job (for example as effect of a systemctl start invocation or similar), show brief information about all jobs enqueued, covering both the requested job and any added because of unit dependencies. Note that the output will only include jobs immediately part of the transaction requested. It is possible that service start-up program code run as effect of the enqueued jobs might request further jobs to be pulled in. This means that completion of the listed jobs might ultimately entail more jobs than the listed ones.
Added in version 242.
--fail
Shorthand for --job-mode=fail.
When used with the kill command, if no units were killed, the operation results in an error.
Added in version 227.
--check-inhibitors=
When system shutdown or sleep state is requested, this option controls checking of inhibitor locks. It takes one of "auto", "yes" or "no". Defaults to "auto", which will behave like "yes" for interactive invocations (i.e. from a TTY) and "no" for non-interactive invocations. "yes" lets the request respect inhibitor locks. "no" lets the request ignore inhibitor locks.
Applications can establish inhibitor locks to prevent certain important operations (such as CD burning) from being interrupted by system shutdown or sleep. Any user may take these locks and privileged users may override these locks. If any locks are taken, shutdown and sleep state requests will normally fail (unless privileged). However, if "no" is specified or "auto" is specified on a non-interactive requests, the operation will be attempted. If locks are present, the operation may require additional privileges.
Option --force provides another way to override inhibitors.
Added in version 248.
-i
Shortcut for --check-inhibitors=no.
Added in version 198.
--dry-run
Just print what would be done. Currently supported by verbs halt, poweroff, reboot, kexec, suspend, hibernate, hybrid-sleep, suspend-then-hibernate, default, rescue, emergency, and exit.
Added in version 236.
-q, --quiet
Suppress printing of the results of various commands and also the hints about truncated log lines. This does not suppress output of commands for which the printed output is the only result (like show). Errors are always printed.
--no-warn
Don't generate the warnings shown by default in the following cases:
• when systemctl is invoked without procfs mounted on /proc/,
• when using enable or disable on units without install information (i.e. don't have or have an empty [Install] section),
• when using disable combined with --user on units that are enabled in global scope,
• when a stop-ped, disable-d, or mask-ed unit still has active triggering units,
• when a unit file is changed and requires daemon-reload.
Added in version 253.
--no-block
Do not synchronously wait for the requested operation to finish. If this is not specified, the job will be verified, enqueued and systemctl will wait until the unit's start-up is completed. By passing this argument, it is only verified and enqueued. This option may not be combined with --wait.
--wait
When used with start or restart, synchronously wait for started units to terminate again. This option may not be combined with --no-block. Note that this will wait forever if any given unit never terminates (by itself or by getting stopped explicitly); particularly services which use "RemainAfterExit=yes".
When used with is-system-running, wait until the boot process is completed before returning.
When used with kill, wait until the signalled units terminate. Note that this will wait forever if any given unit never terminates.
Added in version 232.
--user
Talk to the service manager of the calling user, rather than the service manager of the system.
--system
Talk to the service manager of the system. This is the implied default.
--failed
List units in failed state. This is equivalent to --state=failed.
Added in version 233.
--no-wall
Do not send wall message before halt, power-off and reboot.
--global
When used with enable and disable, operate on the global user configuration directory, thus enabling or disabling a unit file globally for all future logins of all users.
--no-reload
When used with enable, disable, preset, mask, or unmask, do not implicitly reload daemon configuration after executing the changes.
--no-ask-password
When used with start and related commands, disables asking for passwords. Background services may require input of a password or passphrase string, for example to unlock system hard disks or cryptographic certificates. Unless this option is specified and the command is invoked from a terminal, systemctl will query the user on the terminal for the necessary secrets. Use this option to switch this behavior off. In this case, the password must be supplied by some other means (for example graphical password agents) or the service might fail. This also disables querying the user for authentication for privileged operations.
--kill-whom=
When used with kill, choose which processes to send a UNIX process signal to. Must be one of main, control or all to select whether to kill only the main process, the control process or all processes of the unit. The main process of the unit is the one that defines the life-time of it. A control process of a unit is one that is invoked by the manager to induce state changes of it. For example, all processes started due to the ExecStartPre=, ExecStop= or ExecReload= settings of service units are control processes. Note that there is only one control process per unit at a time, as only one state change is executed at a time. For services of type Type=forking, the initial process started by the manager for ExecStart= is a control process, while the process ultimately forked off by that one is then considered the main process of the unit (if it can be determined). This is different for service units of other types, where the process forked off by the manager for ExecStart= is always the main process itself. A service unit consists of zero or one main process, zero or one control process plus any number of additional processes. Not all unit types manage processes of these types however. For example, for mount units, control processes are defined (which are the invocations of /usr/bin/mount and /usr/bin/umount), but no main process is defined. If omitted, defaults to all.
Added in version 252.
--kill-value=INT
If used with the kill command, enqueues a signal along with the specified integer value parameter to the specified process(es). This operation is only available for POSIX Realtime Signals (i.e. --signal=SIGRTMIN+... or --signal=SIGRTMAX-...), and ensures the signals are generated via the sigqueue(3) system call, rather than kill(3). The specified value must be a 32-bit signed integer, and may be specified either in decimal, in hexadecimal (if prefixed with "0x"), octal (if prefixed with "0o") or binary (if prefixed with "0b")
If this option is used the signal will only be enqueued on the control or main process of the unit, never on other processes belonging to the unit, i.e. --kill-whom=all will only affect main and control processes but no other processes.
Added in version 254.
-s, --signal=
When used with kill, choose which signal to send to selected processes. Must be one of the well-known signal specifiers such as SIGTERM, SIGINT or SIGSTOP. If omitted, defaults to SIGTERM.
The special value "help" will list the known values and the program will exit immediately, and the special value "list" will list known values along with the numerical signal numbers and the program will exit immediately.
--what=
Select what type of per-unit resources to remove when the clean command is invoked, see above. Takes one of configuration, state, cache, logs, runtime, fdstore to select the type of resource. This option may be specified more than once, in which case all specified resource types are removed. Also accepts the special value all as a shortcut for specifying all six resource types. If this option is not specified defaults to the combination of cache, runtime and fdstore, i.e. the three kinds of resources that are generally considered to be redundant and can be reconstructed on next invocation. Note that the explicit removal of the fdstore resource type is only useful if the FileDescriptorStorePreserve= option is enabled, since the file descriptor store is otherwise cleaned automatically when the unit is stopped.
Added in version 243.
-f, --force
When used with enable, overwrite any existing conflicting symlinks.
When used with edit, create all of the specified units which do not already exist.
When used with suspend, hibernate, hybrid-sleep, or suspend-then-hibernate, the error returned by systemd-logind will be ignored, and the operation will be performed directly through starting the corresponding units.
When used with halt, poweroff, reboot, or kexec, execute the selected operation without shutting down all units. However, all processes will be killed forcibly and all file systems are unmounted or remounted read-only. This is hence a drastic but relatively safe option to request an immediate reboot. If --force is specified twice for these operations (with the exception of kexec), they will be executed immediately, without terminating any processes or unmounting any file systems.
Warning
Specifying --force twice with any of these operations
might result in data loss. Note that when --force is
specified twice the selected operation is executed by
systemctl itself, and the system manager is not
contacted. This means the command should succeed even when
the system manager has crashed.
--message=
When used with halt, poweroff or reboot, set a short message explaining the reason for the operation. The message will be logged together with the default shutdown message.
Added in version 225.
--now
When used with enable, the units will also be started. When used with disable or mask, the units will also be stopped. The start or stop operation is only carried out when the respective enable or disable operation has been successful.
Added in version 220.
--root=
When used with enable/disable/is-enabled (and related commands), use the specified root path when looking for unit files. If this option is present, systemctl will operate on the file system directly, instead of communicating with the systemd daemon to carry out changes.
--image=image
Takes a path to a disk image file or block device node. If specified, all operations are applied to file system in the indicated disk image. This option is similar to --root=, but operates on file systems stored in disk images or block devices. The disk image should either contain just a file system or a set of file systems within a GPT partition table, following the Discoverable Partitions Specification [2] . For further information on supported disk images, see systemd-nspawn(1)'s switch of the same name.
Added in version 252.
--image-policy=policy
Takes an image policy string as argument, as per systemd.image-policy(7). The policy is enforced when operating on the disk image specified via --image=, see above. If not specified defaults to the "*" policy, i.e. all recognized file systems in the image are used.
--runtime
When used with enable, disable, edit, (and related commands), make changes only temporarily, so that they are lost on the next reboot. This will have the effect that changes are not made in subdirectories of /etc/ but in /run/, with identical immediate effects, however, since the latter is lost on reboot, the changes are lost too.
Similarly, when used with set-property, make changes only temporarily, so that they are lost on the next reboot.
--preset-mode=
Takes one of "full" (the default), "enable-only", "disable-only". When used with the preset or preset-all commands, controls whether units shall be disabled and enabled according to the preset rules, or only enabled, or only disabled.
Added in version 215.
-n, --lines=
When used with status, controls the number of journal lines to show, counting from the most recent ones. Takes a positive integer argument, or 0 to disable journal output. Defaults to 10.
-o, --output=
When used with status, controls the formatting of the journal entries that are shown. For the available choices, see journalctl(1). Defaults to "short".
--firmware-setup
When used with the reboot, poweroff, or halt command, indicate to the system's firmware to reboot into the firmware setup interface for the next boot. Note that this functionality is not available on all systems.
Added in version 220.
--boot-loader-menu=timeout
When used with the reboot, poweroff, or halt command, indicate to the system's boot loader to show the boot loader menu on the following boot. Takes a time value as parameter — indicating the menu timeout. Pass zero in order to disable the menu timeout. Note that not all boot loaders support this functionality.
Added in version 242.
--boot-loader-entry=ID
When used with the reboot, poweroff, or halt command, indicate to the system's boot loader to boot into a specific boot loader entry on the following boot. Takes a boot loader entry identifier as argument, or "help" in order to list available entries. Note that not all boot loaders support this functionality.
Added in version 242.
--reboot-argument=
This switch is used with reboot. The value is architecture and firmware specific. As an example, "recovery" might be used to trigger system recovery, and "fota" might be used to trigger a “firmware over the air” update.
Added in version 246.
--plain
When used with list-dependencies, list-units or list-machines, the output is printed as a list instead of a tree, and the bullet circles are omitted.
Added in version 203.
--timestamp=
Change the format of printed timestamps. The following values may be used:
pretty (this is the default)
"Day YYYY-MM-DD HH:MM:SS TZ"
Added in version 248.
unix
"@seconds-since-the-epoch"
Added in version 251.
us, μs
"Day YYYY-MM-DD HH:MM:SS.UUUUUU TZ"
Added in version 248.
utc
"Day YYYY-MM-DD HH:MM:SS UTC"
Added in version 248.
us+utc, μs+utc
"Day YYYY-MM-DD HH:MM:SS.UUUUUU UTC"
Added in version 248.
Added in version 247.
--mkdir
When used with bind, creates the destination file or directory before applying the bind mount. Note that even though the name of this option suggests that it is suitable only for directories, this option also creates the destination file node to mount over if the object to mount is not a directory, but a regular file, device node, socket or FIFO.
Added in version 248.
--marked
Only allowed with reload-or-restart. Enqueues restart jobs for all units that have the "needs-restart" mark, and reload jobs for units that have the "needs-reload" mark. When a unit marked for reload does not support reload, restart will be queued. Those properties can be set using set-property Markers=....
Unless --no-block is used, systemctl will wait for the queued jobs to finish.
Added in version 248.
--read-only
When used with bind, creates a read-only bind mount.
Added in version 248.
--drop-in=NAME
When used with edit, use NAME as the drop-in file name instead of override.conf.
Added in version 253.
--when=
When used with halt, poweroff, reboot or kexec, schedule the action to be performed at the given timestamp, which should adhere to the syntax documented in systemd.time(7) section "PARSING TIMESTAMPS". Specially, if "show" is given, the currently scheduled action will be shown, which can be canceled by passing an empty string or "cancel".
Added in version 254.
--stdin
When used with edit, the contents of the file will be read from standard input and the editor will not be launched. In this mode, the old contents of the file are completely replaced. This is useful to "edit" unit files from scripts:
$
systemctl edit --drop-in=limits.conf --stdin
some-service.service <<EOF
[Unit]
AllowedCPUs=7,11
EOF
Multiple drop-ins may be "edited" in this mode; the same contents will be written to all of them.
Added in version 256.
-H, --host=
Execute the operation remotely. Specify a hostname, or a username and hostname separated by "@", to connect to. The hostname may optionally be suffixed by a port ssh is listening on, separated by ":", and then a container name, separated by "/", which connects directly to a specific container on the specified host. This will use SSH to talk to the remote machine manager instance. Container names may be enumerated with machinectl -H HOST. Put IPv6 addresses in brackets.
-M, --machine=
Execute operation on a local container. Specify a container name to connect to, optionally prefixed by a user name to connect as and a separating "@" character. If the special string ".host" is used in place of the container name, a connection to the local system is made (which is useful to connect to a specific user's user bus: "--user --machine=lennart@.host"). If the "@" syntax is not used, the connection is made as root user. If the "@" syntax is used either the left hand side or the right hand side may be omitted (but not both) in which case the local user name and ".host" are implied.
-C, --capsule=
Execute operation on a capsule. Specify a capsule name to connect to. See capsule@.service(5) for details about capsules.
Added in version 256.
--no-pager
Do not pipe output into a pager.
--legend=BOOL
Enable or disable printing of the legend, i.e. column headers and the footer with hints. The legend is printed by default, unless disabled with --quiet or similar.
-h, --help
Print a short help text and exit.
--version
Print a short version string and exit.
EXIT STATUS
On success, 0 is returned, a non-zero failure code otherwise.
systemctl uses the return codes defined by LSB, as defined in LSB 3.0.0 [3] .
Table 4. LSB return codes
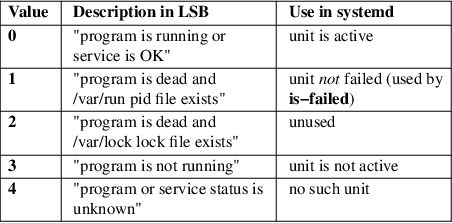
The mapping of LSB service states to systemd unit states is imperfect, so it is better to not rely on those return values but to look for specific unit states and substates instead.
ENVIRONMENT
$SYSTEMD_EDITOR
Editor to use when editing units; overrides $EDITOR and $VISUAL. If neither $SYSTEMD_EDITOR nor $EDITOR nor $VISUAL are present or if it is set to an empty string or if their execution failed, systemctl will try to execute well known editors in this order: editor(1), nano(1), vim(1), vi(1).
Added in version 218.
$SYSTEMD_LOG_LEVEL
The maximum log level of emitted messages (messages with a higher log level, i.e. less important ones, will be suppressed). Takes a comma-separated list of values. A value may be either one of (in order of decreasing importance) emerg, alert, crit, err, warning, notice, info, debug, or an integer in the range 0...7. See syslog(3) for more information. Each value may optionally be prefixed with one of console, syslog, kmsg or journal followed by a colon to set the maximum log level for that specific log target (e.g. SYSTEMD_LOG_LEVEL=debug,console:info specifies to log at debug level except when logging to the console which should be at info level). Note that the global maximum log level takes priority over any per target maximum log levels.
$SYSTEMD_LOG_COLOR
A boolean. If true, messages written to the tty will be colored according to priority.
This setting is only useful when messages are written directly to the terminal, because journalctl(1) and other tools that display logs will color messages based on the log level on their own.
$SYSTEMD_LOG_TIME
A boolean. If true, console log messages will be prefixed with a timestamp.
This setting is only useful when messages are written directly to the terminal or a file, because journalctl(1) and other tools that display logs will attach timestamps based on the entry metadata on their own.
$SYSTEMD_LOG_LOCATION
A boolean. If true, messages will be prefixed with a filename and line number in the source code where the message originates.
Note that the log location is often attached as metadata to journal entries anyway. Including it directly in the message text can nevertheless be convenient when debugging programs.
$SYSTEMD_LOG_TARGET
The destination for log messages. One of console (log to the attached tty), console-prefixed (log to the attached tty but with prefixes encoding the log level and "facility", see syslog(3), kmsg (log to the kernel circular log buffer), journal (log to the journal), journal-or-kmsg (log to the journal if available, and to kmsg otherwise), auto (determine the appropriate log target automatically, the default), null (disable log output).
$SYSTEMD_PAGER
Pager to use when --no-pager is not given; overrides $PAGER. If neither $SYSTEMD_PAGER nor $PAGER are set, a set of well-known pager implementations are tried in turn, including less(1) and more(1), until one is found. If no pager implementation is discovered no pager is invoked. Setting this environment variable to an empty string or the value "cat" is equivalent to passing --no-pager.
Note: if $SYSTEMD_PAGERSECURE is not set, $SYSTEMD_PAGER (as well as $PAGER) will be silently ignored.
$SYSTEMD_LESS
Override the options passed to less (by default "FRSXMK").
Users might want to change two options in particular:
K
This option instructs the pager to exit immediately when Ctrl+C is pressed. To allow less to handle Ctrl+C itself to switch back to the pager command prompt, unset this option.
If the value of $SYSTEMD_LESS does not include "K", and the pager that is invoked is less, Ctrl+C will be ignored by the executable, and needs to be handled by the pager.
X
This option instructs the pager to not send termcap initialization and deinitialization strings to the terminal. It is set by default to allow command output to remain visible in the terminal even after the pager exits. Nevertheless, this prevents some pager functionality from working, in particular paged output cannot be scrolled with the mouse.
Note that setting the regular $LESS environment variable has no effect for less invocations by systemd tools.
See less(1) for more discussion.
$SYSTEMD_LESSCHARSET
Override the charset passed to less (by default "utf-8", if the invoking terminal is determined to be UTF-8 compatible).
Note that setting the regular $LESSCHARSET environment variable has no effect for less invocations by systemd tools.
$SYSTEMD_PAGERSECURE
Takes a boolean argument. When true, the "secure" mode of the pager is enabled; if false, disabled. If $SYSTEMD_PAGERSECURE is not set at all, secure mode is enabled if the effective UID is not the same as the owner of the login session, see geteuid(2) and sd_pid_get_owner_uid(3). In secure mode, LESSSECURE=1 will be set when invoking the pager, and the pager shall disable commands that open or create new files or start new subprocesses. When $SYSTEMD_PAGERSECURE is not set at all, pagers which are not known to implement secure mode will not be used. (Currently only less(1) implements secure mode.)
Note: when commands are invoked with elevated privileges, for example under sudo(8) or pkexec(1), care must be taken to ensure that unintended interactive features are not enabled. "Secure" mode for the pager may be enabled automatically as describe above. Setting SYSTEMD_PAGERSECURE=0 or not removing it from the inherited environment allows the user to invoke arbitrary commands. Note that if the $SYSTEMD_PAGER or $PAGER variables are to be honoured, $SYSTEMD_PAGERSECURE must be set too. It might be reasonable to completely disable the pager using --no-pager instead.
$SYSTEMD_COLORS
Takes a boolean argument. When true, systemd and related utilities will use colors in their output, otherwise the output will be monochrome. Additionally, the variable can take one of the following special values: "16", "256" to restrict the use of colors to the base 16 or 256 ANSI colors, respectively. This can be specified to override the automatic decision based on $TERM and what the console is connected to.
$SYSTEMD_URLIFY
The value must be a boolean. Controls whether clickable links should be generated in the output for terminal emulators supporting this. This can be specified to override the decision that systemd makes based on $TERM and other conditions.
SEE ALSO
systemd(1), journalctl(1), loginctl(1), machinectl(1), systemd.unit(5), systemd.resource-control(5), systemd.special(7), wall(1), systemd.preset(5), systemd.generator(7), glob(7)
NOTES
|
1. |
Boot Loader Specification |
https://uapi-group.org/specifications/specs/boot_loader_specification
|
2. |
Discoverable Partitions Specification |
https://uapi-group.org/specifications/specs/discoverable_partitions_specification
|
3. |
LSB 3.0.0 |
http://refspecs.linuxbase.org/LSB_3.0.0/LSB-PDA/LSB-PDA/iniscrptact.html